
イリノイ大学アーバナ·シャンペーン校のエンジニアは電気パルスで制御する3次元印刷タイニーウォーキング「バイオボット」をクラスで明らかにしました。
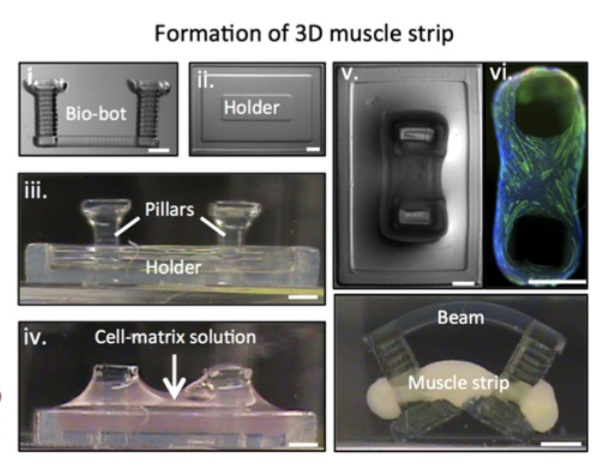
この新しいバイオボットは、電気パルスによって発動する骨格筋細胞のストリップにより体内の筋肉、腱、骨複合体を模倣して設計されました。
今後、学部研究室ではカリキュラムに3Dプリンターを統合していく予定です。
また新しい3Dプリント造形技術の革新が始まります。
外部信号を使用してペースができる骨格筋細胞はそれが特定の信号を受信したときや化学物質を感知したとき、
機能するデバイスは設計上のツールボックスの一部となります。
バイオボットは、構造として十分強く、関節のように曲がる十分な柔軟性がある立体造形3Dプリントを使用した合成ハイドロゲルから作られ、
3Dプリントでは、短い製造時間、拡張性、空間的制御を誇っています。
ポストは、腱や骨の筋肉のようにバックボーンに筋肉のストリップを固定し、それはバイオボットの足として機能します。
電界の高い周波数はバイオボットの進捗状況をスピードアップし、筋肉はより速く収縮します。
エンジニアリング側は将来的に別の信号に基づいて、異なる方向に移動できるヒドロゲル骨格のバイオボットの設計を望んでいます。
この3Dプリンターを利用したシステムでは薬物送達、外科用ロボット、「スマート」インプラントなどを支援する可能性があり、
3Dプリントの生物学的機械の世代への進化が期待されます。

コメントはこちら